| Seismic Approach to Quality Management of HMA MnDOT Contract No. 1034287 Federal Project Number: TPF-5 (341) Execution: January, 2020 - December, 2021 |
| | | | | | | |
| PROJECT PROGRESS (August, 2020) |
Project Tasks | Summary (see details)
- Task 1: Project Management and Administration
Task 2: Hardware Development (Seismic Data Acquisition System) & Testing
Task 3: Software Development & Testing
Task 4: Delivery and Demonstration of Seismic Data Acquisition System and Software
Task 5: Final Report
Year 1 (2020):
Year 2 (2021):
- Muting Air and Pre-Lamb Wavefields
The importance of properly alleviating air wave energy existing in an acquired raw field record has been addressed multiple times in the
previous work reports (e.g., April, May, and July progress reports). This report summarizes outcomes from one of those approaches
when applied to a field data set acquired on August 12, 2020, on the same road previously surveyed (see here for previous survey
results). Among multiple approaches, It is the “mute” approach summarized in this report that erases (i.e., zeros) all wavefields outside
a designated mute window in a time-offset display of a raw field record. It turned out to be the most effective when constructing an
accurate Lamb dispersion trend. It is also important to apply a pre-Lamb mute to reduce harmful influence from ambient noise.
Therefore, both air-wave mute and pre-Lamb mute are simultaneously applied to the raw field record. Three (3) different types of mute
have been tested. One is called “MANUAL Mute” that sets the mute window by visually inspecting the record to identify air-wave and
Lamb-wave arrival times (msT0-air and msT0-Lamb) and propagating velocities (V-air and V-Lamb). With this approach, each record is
manually muted one by one. The other type is called “SURGICAL Mute” that sets the mute window semi-automatically based on the
presumptive values for msT0-air, msT0-Lamb, V-air, and V-Lamb. The arrival times (msT0-air and msT0-Lamb) can be approximately
estimated based on the acquisition parameter of pre-trigger time (e.g., 1.0 ms), which is the length of previous time after air waves
triggered the recording and therefore should be included in the acquired record. The velocity values (V-air and V-Lamb) can be set
arbitrarily based on a common range of each type of waves (e.g., V-air = 340 m/s and V-Lamb = 1500 m/s). Once these values are set,
then the “SURGICAL Mute” applies the same mute window to all records existing in the input file automatically. The last type is called
“AUTO Mute” that tries to detect all four parameters (i.e., msT0-air, msT0-Lamb, V-air and V-Lamb) automatically through its own
detecting algorithm. The algorithm is based on the Linear-Move-Out (LMO) stacking to detect different waves (e.g., air vs. Lamb)
arriving with different velocities. The “AUTO Mute” includes additional algorithms that can detect other wave attributes that may exist in
the raw field record such as reverberating air wave arrivals, air wave arrivals from the opposite end of the receiver array, too-low signal-
to-noise (SN) ratio, etc. They are automatically applied whenever detected being necessary to improve the accuracy in the evaluation
of the mute window and also to improve the overall SN ratio of the recorded Lamb waves.
All three (3) approaches are applied to a data set acquired on August 12, 2020, on the same road previously surveyed on July 22,
2020. Results of time-domain records and corresponding dispersion images are displayed in this report for various comparison
purposes in this report. Results from all three approaches are comparable to each other in seismic data and dispersion image
qualities. However, the “AUTO Mute” provided slightly superior quality. The comparison will continue to be made on further future data
sets to confirm the superiority. Advantage of pre-Lamb mute is illustrated in this report by using a field record that shows dispersion
image trend at high frequencies (e.g., > 20 kHz) is improved due to the attenuation of ambient noise in the corresponding high
frequency range.
Importance of using a “proper” mute window is also illustrated in this report by using a field record.
- Data Acquired on August 12, 2020
- All (20) field records acquired on August 12, 2020, are displayed in this report in raw data format as well as processed dispersion image
format for the purpose of evaluating Lamb wave quality. They were obtained by using both forward (FWRD) and reverse (REVS) impact
sources attached at forward (i.e., #1 channel side) and reverse (i.e., #48 channel side) side of the receiver array, respectively (watch
the video below). All reverse-shot records, however, are purposely flipped to look like forward-shot records by the software at the time
of data import, which is necessary to apply all mute approaches properly. In consequence, those reverse-shot records are separately
marked by (*) to indicate so.
Comparing dispersion images from forward- and reverse-shot records, those from the reverse shots did not have proper Lamb
dispersion trend as shown in this report. This seems to be related to a short pre-trigger time (0.5 ms) that was not long enough to catch
the Lamb waves that arrived earlier than air waves by more than 0.5 ms (e.g., 1.0 ms) due to the extended distance between the array
center and the impact point of the reverse shot. This will be verified from a next field survey with a longer pre-trigger time (e.g., 1.5
ms). This hypothesis was tested in two slides by using rough estimation of impact distances for both shots (i.e., FWARD and REVE)
from the receiver array by using a configuration shown on a photo.
Amplitudes of forward and reverse shots are compared by displaying peak amplitudes of all (48) traces in each record in this report.
The display indicates that, in general, the reverse shots were more powerful than the forward shots.
Decimation of channels (i.e., from 48 to 16 channels) was tested for each record from surveys performed during July and August for the
purpose of evaluating any possible degrade of data quality in Lamb dispersion image. The results shown in this report indicate there is
little difference, indicating that a 16-channel array will be able to provide an equally good quality.
- TDMS Data Format
- A separate project to make a C++ module to import a TDMS data file and convert into a ParkSEIS (PS) data file has been launched in
mid July. The project was executed by a freelancer who used to work on building PXI systems (a similar hardware system for this
project) that saved output data in TDMS format. The final code set has been delivered and is currently under modification to be merged
into the ParkSEIS-HMA software package. It is not an entirely independent C++ code set, but has a dependency on the NI's built-in
library that needs to be downloaded online and installed on the computer that runs the ParkSEIS-HMA package.

A 48-channel MEMS microphone array rolling with both forward (right) and reverse (left) bouncing impact sources.
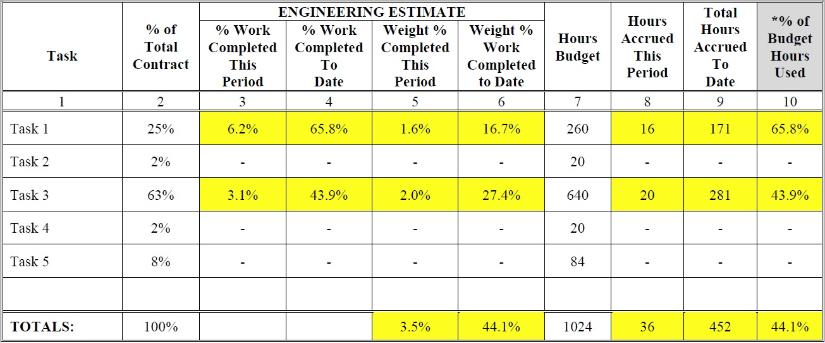
| Progress Table (Prime Contractor - Park Seismic LLC) - August, 2020 |
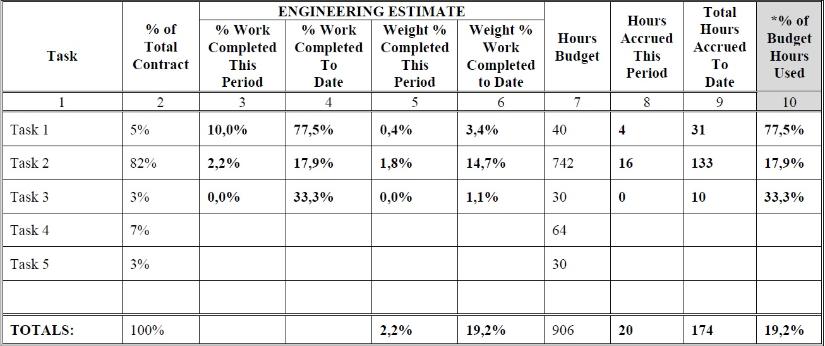
| Progress Table (Sub Contractor - Norrfee Tech) - August, 2020 |
Park Seismic LLC, Shelton, Connecticut, Tel: 347-860-1223, Fax: 203-513-2056, Email: contact@parkseismic.com